Portable High Torque Hip Exoskeleton
Our design of quasi-direct drive actuation-based exoskeleton demonstrates mechanical versatility for being lightweight (3.2 kg overall mass), compliant (backdrivable) with high torque (36 Nm) and high control bandwidth.

Specifications
| Property | Value |
|---|---|
| Total Mass | 3.2 kg |
| Portability | Fully Portable |
| Voltage | 24 V |
| Rated Torque | 12 Nm |
| Peak Torque | 36 Nm |
| Gear Ratio | 9:1 |
| Flexion/Extension Abduction/Adduction |
130°/40° 90°/60° |
| Battery Life | 1.5 hours |
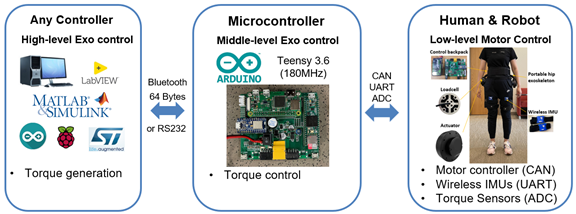
Architecture of Sensor, Communication, Control
The electronic architecture of the exoskeleton facilitated high-level torque control, motor control, sensor signal conditioning, data communication, and power management.