Biomechatronics and Intelligent Robotics Lab



Dr. Hao Su, PhD, is an Associate Professor at the New York University.
He is the Director of Biomechatronics and Intelligent Robotics Lab. He is the Director of Center of Assistive and Personal
Robotics for Independent Living (APRIL).
He was an associate professor at North Carolina State University and the University of North Carolina at Chapel Hill,
after previously serving as the Irwin Zahn Endowed Assistant Professor at City College of the City University of New York.
He was a Research
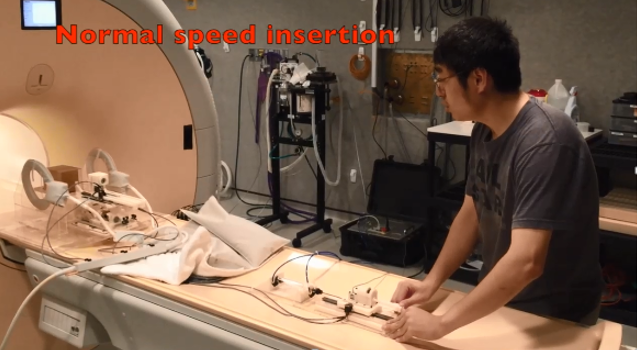
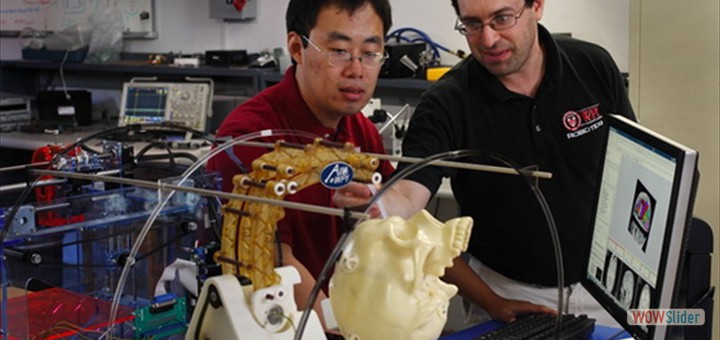
Scientist at Philips Research North America where he designed robots for lung surgery,
and then a postdoctoral fellow at Harvard University and Wyss
Institute for Biologically Inspired
Engineering.
Dr. Su received NSF
CAREER Award,
Switzer Distinguished Fellow by U.S. Department of Health and Human Services, Toyota Mobility Challenge Discover
Award, the Best Medical Robotics Paper Runner-up Award in IEEE
International Conference on Robotics and Automation (ICRA),
Best Student Paper Award, Dynamic Systems & Control Division, American Society of Mechanical Engineers, and
Philips Innovation
Transfer Award. He received the Advanced
Simulation & Training Award from the Link Foundation and Dr. Richard Schlesinger Award
from the American Society for Quality. His work was published in IEEE Transactions on Robotics, IEEE/ASME
Transactions on Mechatronics, Nature, Science Robotics, Nature Machine Intelligence, Nature Communications,
and Science Advances. He serves as Technical Editor of
IEEE/ASME Transactions on Mechatronics, associate editor of IEEE Robotics and Automation Magazine (RAM), IEEE
Robotics and Automation Letters (RAL), IEEE International Conference
on Robotics and Automation (ICRA), IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS), and serves on the Editorial Advisory Board for
the International Journal of Medical Robotics and
Computer-Assisted Surgery. He is a keynote speaker of IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS).
In addition, Dr. Su is the Chair of the Mechatronics Technical Committee, Dynamic Systems &
Control Division, American Society of Mechanical Engineers (ASME), and the Co-Chair of the Technical
Committee on Mechanisms and Design, IEEE Robotics and Automation Society (RAS). He is a member of the
Organizing Commitee and Senior Program Committee of IROS 2026.
Dr. Su is reviewer of NIH Bioengineering, Technology and Surgical Sciences Study Section (BTSS) and NIH Musculoskeletal Rehabilitation Sciences Study Section (MRS). He holds patents on surgical
robotics and socially assistive robots.

We gratefully acknowledge the supports from:



June 12, 2024 (Pinned)
Our lab has recently published a paper titled "Experiment-free exoskeleton assistance via learning in simulation" in Nature, which is now available for public access. Congratulations to all the authors! (News coverage: Fox News Report | Fox News Video | Yahoo! | AOL | Popular Science | WRAL News)
July 26, 2024
A new paper titled "Adaptive hierarchical origami-based metastructures" has been recently published in the Nature Communications journal and is now available for public access.
June 26, 2024
Our lab has recently published a paper titled "Reprogrammable and reconfigurable mechanical computing metastructures with stable and high-density memory" in the journal Science Advances and is now available for public access.
September 15, 2023
PhD candidate Junxi Zhu received 2022 Best Paper in Mechatronics Award (paper link) that will be officially announced and presented at the Mechatronics TC meeting at the Modeling, Estimation and Control Conference at Lake Tahoe, NV.
September 8, 2023
Our lab has recently published a paper titled "Physically intelligent autonomous soft robotic maze escaper" (paper link) in the journal Science Advances and is now available for public access.
August 21, 2023
Dr. Su received 2nd NIH R01 grant and the project title is "Spine-Hip Exoskeletons with Learning-Based Optimal Control for Low Back Pain Alleviation" (1R01EB035404-01), to develop spine-hip exoskeleton for injury mitigation of workers.
April 5, 2023
Biomechatronics and Intelligent Robotics Lab Ph.D. Candidates visited the Brain Tool Laboratory directed by Dr. Patrick Codd with the Department of Neurosurgery and the Pratt School of Engineering at Duke University in Durham, NC.
April 1, 2023
Dr. Su presented the Biomechatronics and Intelligent Robotics Lab latest research about wearable robots at the Wearable Robotics Association WearRAcon 23 hosted in the Hyatt Regency New Orleans, Louisiana
November 20, 2022
Dr. Su gave invited talk with Dr. Thomas Bulea at National Institute of Health titled “Affordable Wearable Robots for Translational Medicine” at Global Perspectives on Medicine, Rehabilitation and Robotics Webinar Series organized by Prof. Michelle Johnson at UPenn and Prof. Rochelle Mendonca at Columbia U..
October 13, 2022
Dr. Hao Su received a Distinguished Switzer Fellowship from the National Institute on Disability, Independent Living, and Rehabilitation Research (NIDILRR). The project title is “Biomechanical Benefits of Lightweight Wearable Robots for Community-Based Mobility Assistance of Children with Crouch Gait from Cerebral Palsy.”
September 18, 2022
Dr. Su received NSF Future of Work grant to design image-guided semi-autonomous surgical robots to protect healthcare workers. The project is titled "Safeguarding the Health of Healthcare Workers During Future Pandemics, Using Robotics and Automation"
July 24, 2022
Professor Su presented the recent research from the Biomechatronics and Intelligent Robotics Lab at the National Workshop on Human-like Robots sponsored by the National Science Foundation (NSF) and hosted in Arlington, VA. Israel Dominguez (BIROLab PhD student) represented our lab in the National Workshop on Human-like Robots (In-Person)