Interaction-Safe Humanoid Robot for Augmented Reality-Assisted Telemanipulation
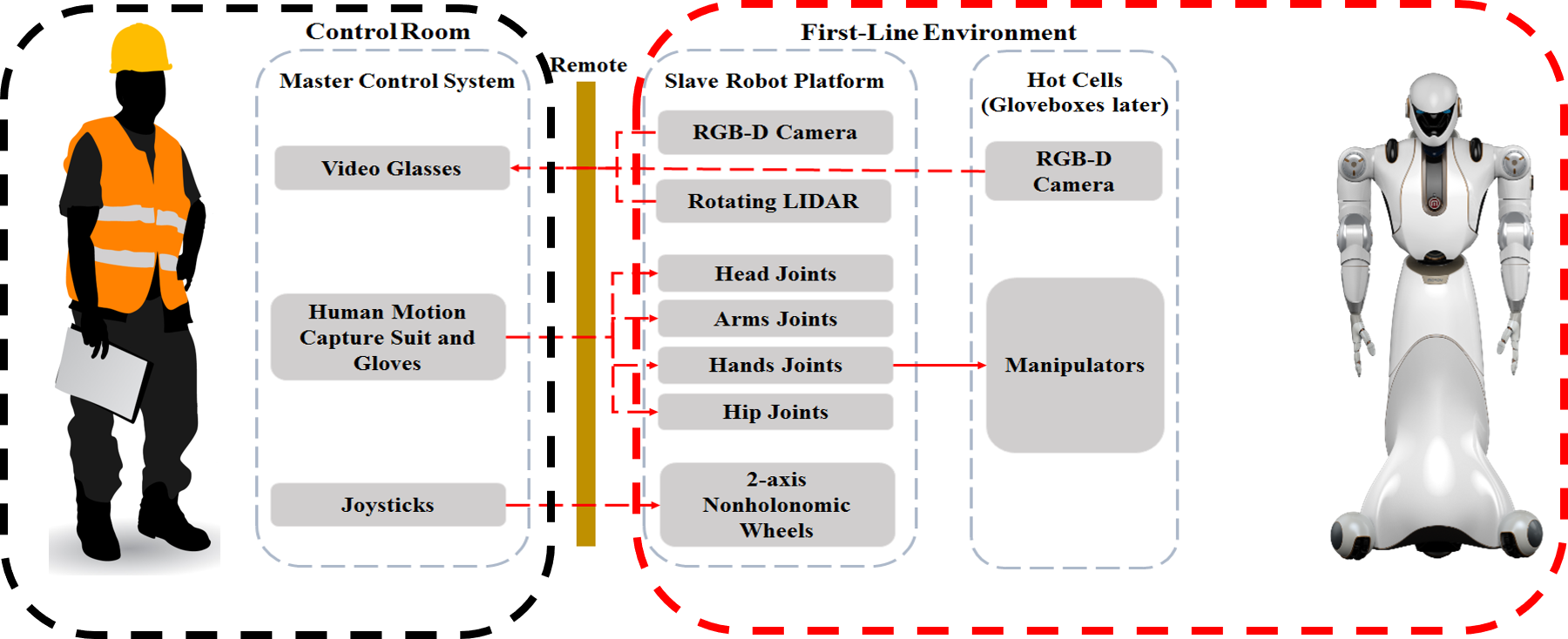
Ineraction safety is crucial for co-robots that physically interact with enviroment or human. With the high torque density actuator, we are developing interaction-safe humanoid robots that is intuitively controlled with human with augmented reality assisted manipulation. Our system consists of an environment-safe slave robot platform and a whole-body master control system. The environment-safe slave robot platform integrates human upper-body manipulation module, mobility module, and vision module and the whole-body master control system integrates wearable human motion capture module and a visual display module. The operator can manipulate the slave robot platform working in front of hot cells through the wearable module and real-time visual display information. In addition, the enviroment view will be acquired by an RGBD camera mounted on the slave robot arm inside the hot cell.