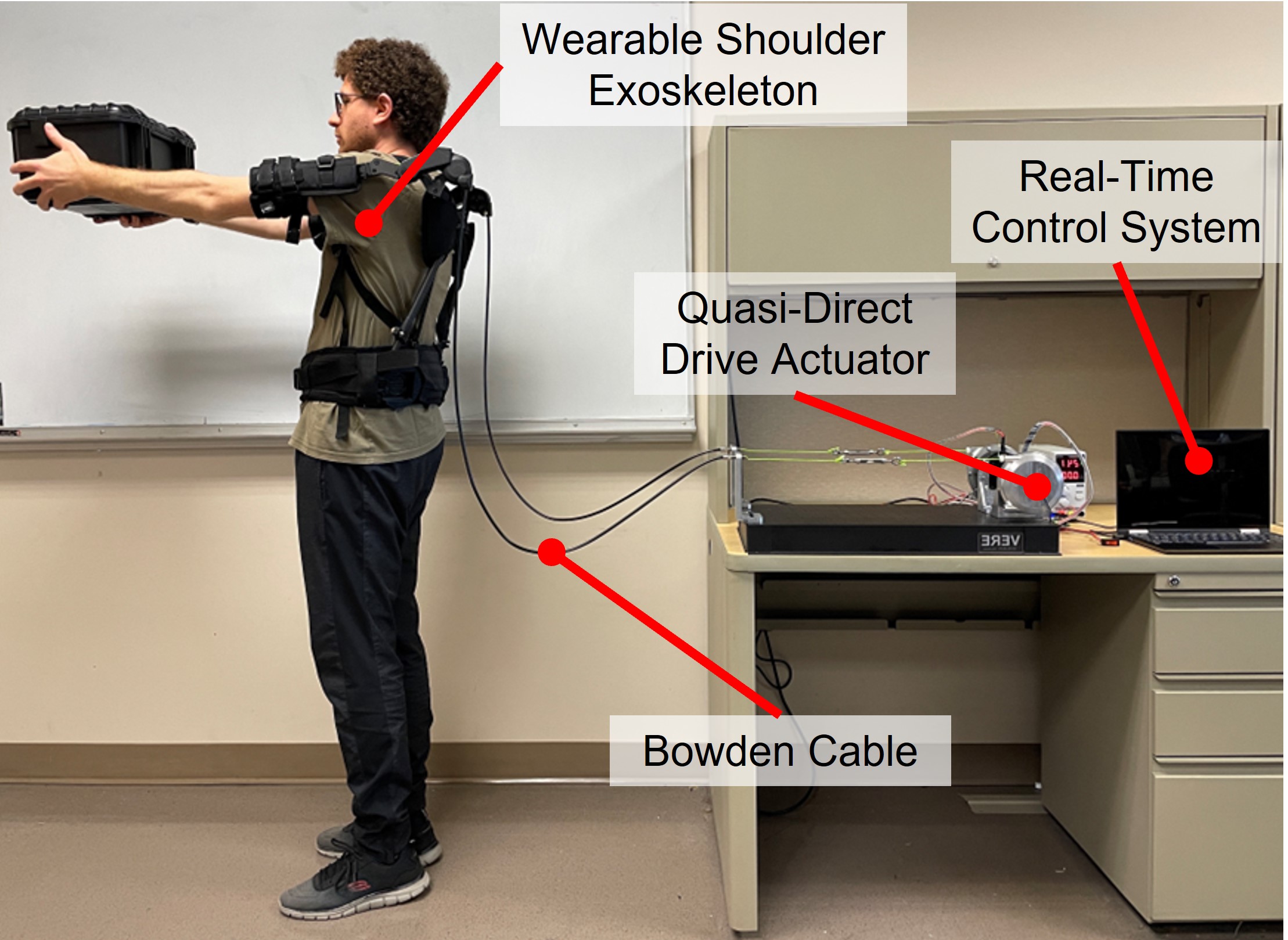
Tethered Upper limb Exosuit (40 Nm)
We designed the tethered actuation 40Nm high torque for biomechanics and control research in the lab.
Data Sheet
| Property | Value |
|---|---|
| Total Mass | 2.2 kg (without tethered actuation) |
| Voltage | 48 V |
| Rated Assistive Torque | 13 Nm |
| Peak Output Torque | 40 Nm |
| Gear Ratio | 9:1 |
| Range of Motion | 0 - 140° |
| Controller Communications | Bluetooth |