Portable Lightweight Soft Hand Exoskeleton
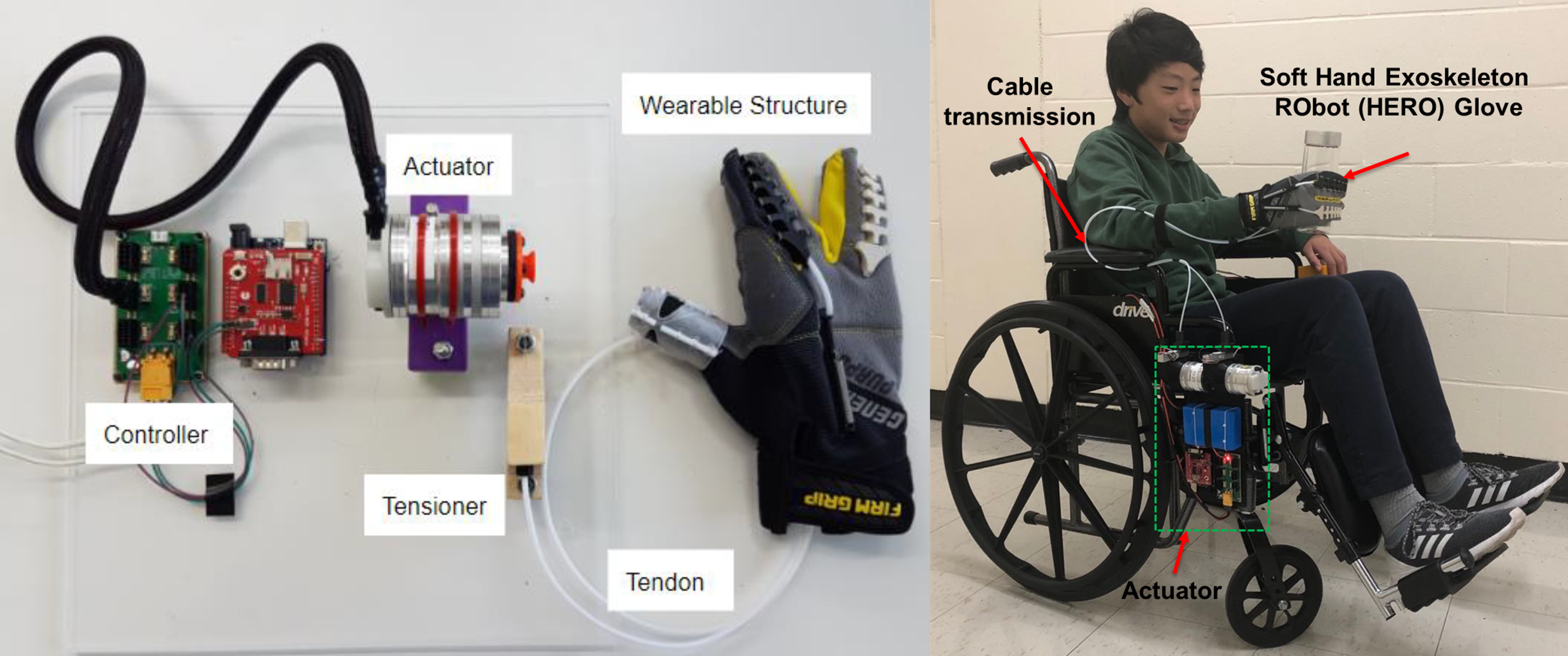
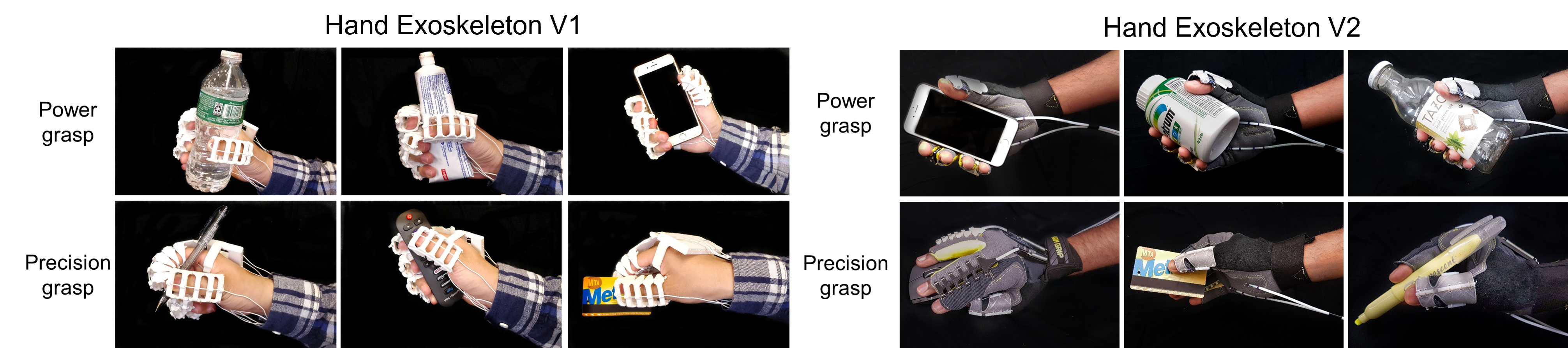
Our portable tendon drive hand exoskeleton can provide assistant flexion force for 3 fingers to perform 5 classes of grasps including flat grasp, distal grasp, cylindrical grasp, spherical grasp, and ring grasp.
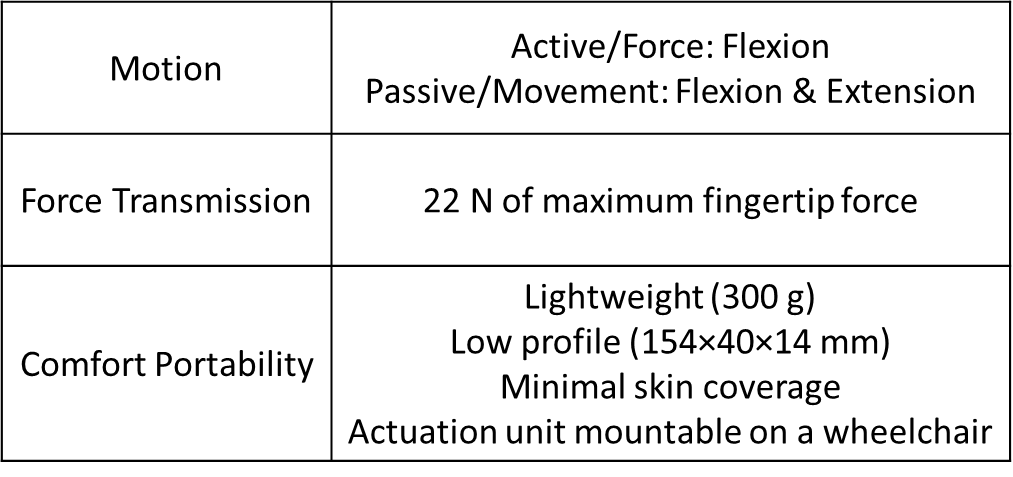
Specifications
Architecture of Sensor, Communication, Control
The electronic architecture of the exoskeleton facilitated high-level control, motor control, sensor signal conditioning, data communication, and power management.
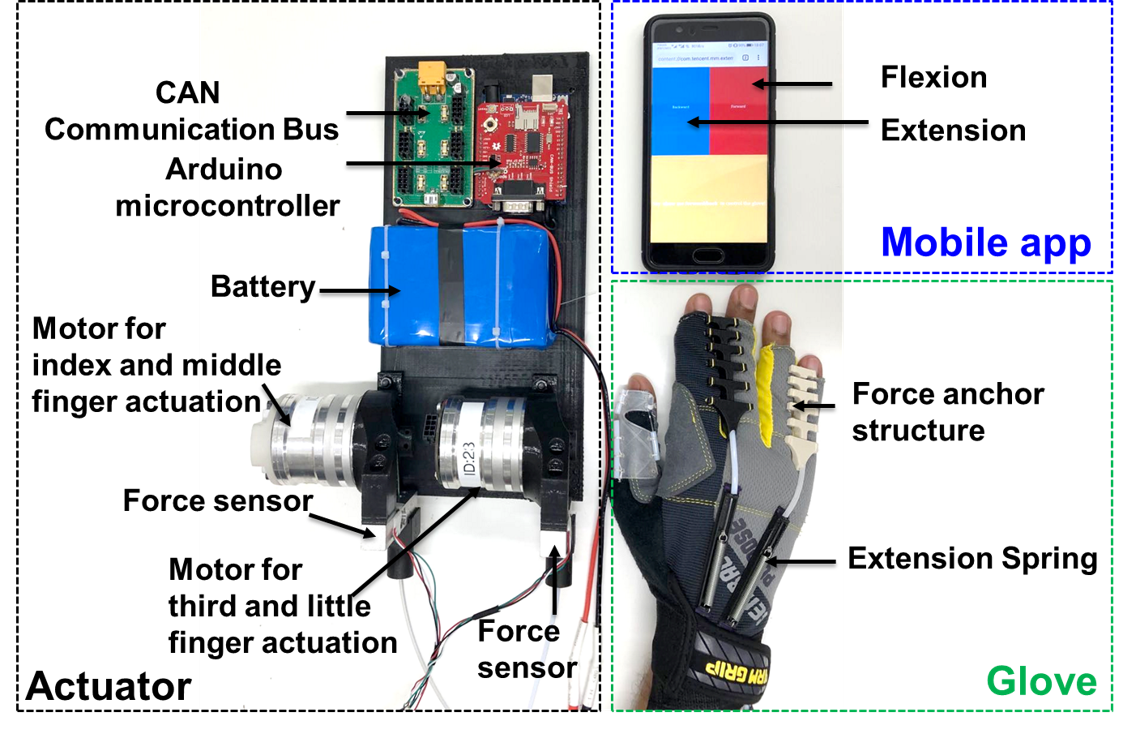
Hardware Features
Publication
Guo, J., Yu, S., Li, Y., Huang, T.H., Wang, J., Lynn, B., Fidock, J., Shen, C.L., Edwards, D. and Su, H., 2018, April.
A soft robotic exo-sheath using fabric EMG sensing for hand rehabilitation and assistance.
In 2018 IEEE international conference on soft robotics (RoboSoft) (pp. 497-503). IEEE.
PDF
Yu, S., Perez, H., Barkas, J., Mohamed, M., Eldaly, M., Huang, T.H., Yang, X., Su, H., del Mar Cortes, M. and Edwards, D.J., 2019, April.
A soft high force hand exoskeleton for rehabilitation and assistance of spinal cord injury and stroke individuals.
In Frontiers in Biomedical Devices (Vol. 41037, p. V001T09A011). American Society of Mechanical Engineers.
PDF