Robots of The Biomechatronics and Intelligent Robotics Lab (BIROLAB)
Lab Developed Custom Robots
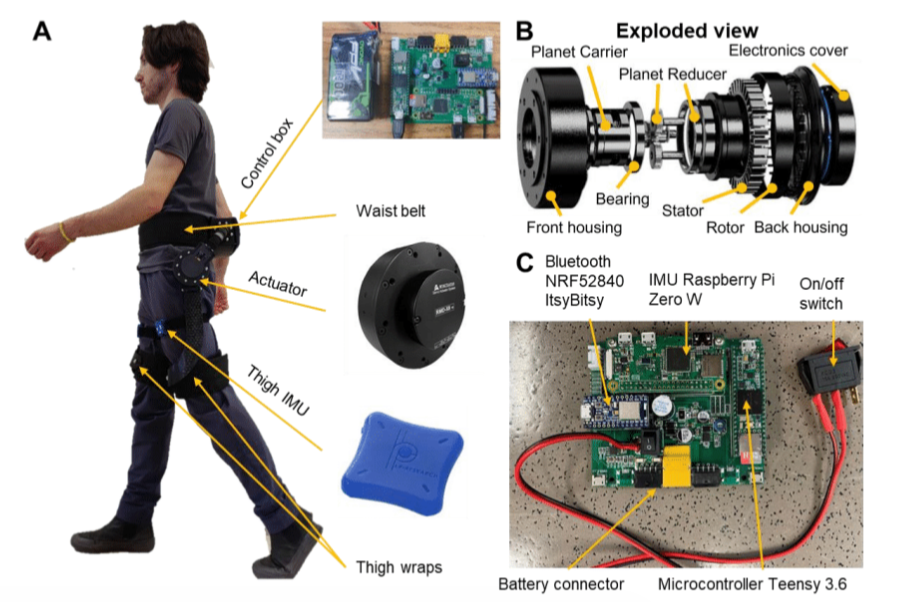
Hip Exoskeleton
Our design of quasi-direct drive actuation-based exoskeleton demonstrates mechanical versatility for being lightweight (3.2 kg overall mass), compliant (backdrivable) with high torque (36 Nm) and high control bandwidth. The electronic architecture of the exoskeleton facilitated high-level torque control, motor control, sensor signal conditioning, data communication, and power management.
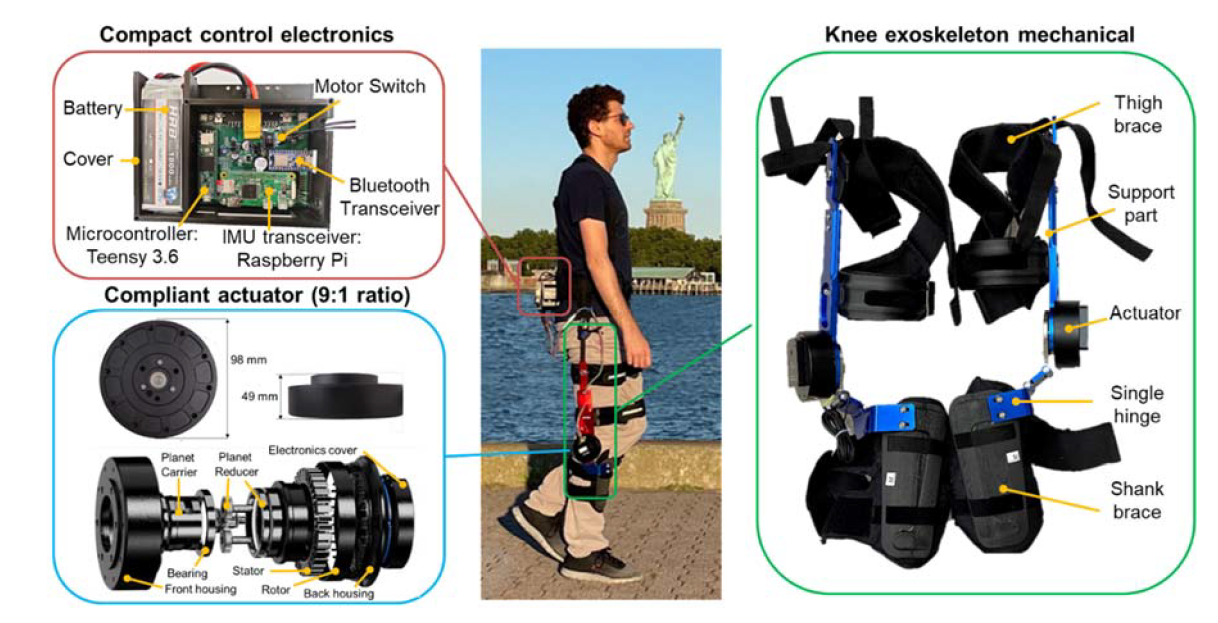
Knee Exoskeleton
We developed an untethered versatile exoskeleton capable of enhancing productivity via endurance augmentation in multiple activities. This was achieved by a lightweight and compliant robot design, which minimized the energy penalty on the wearer while providing high-torque bidirectional flexion and extension assistance.
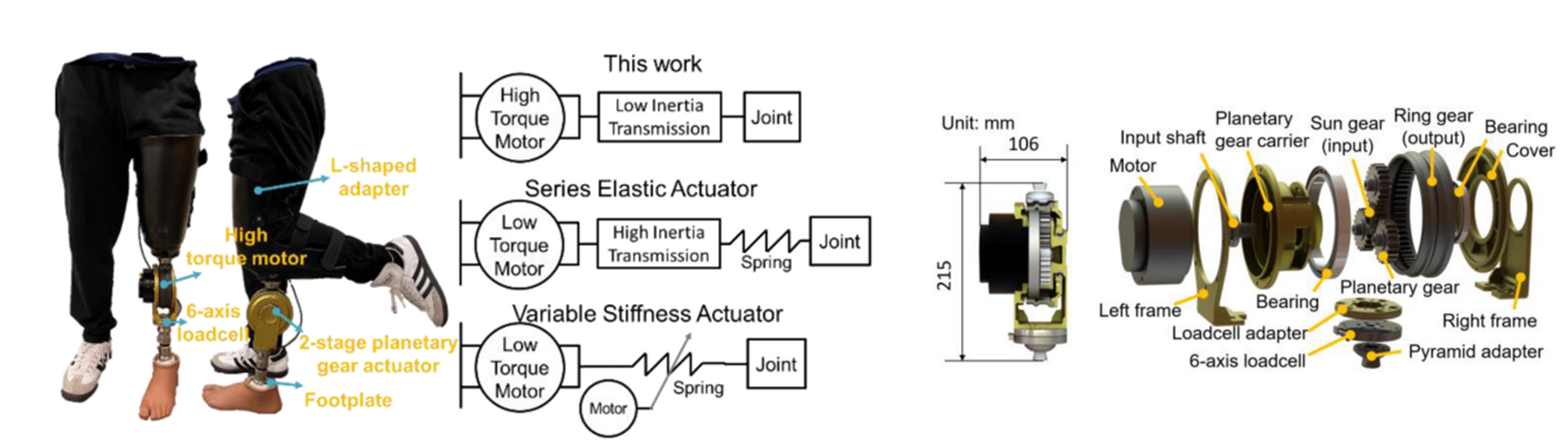
Knee Prosthesis
We developed a knee prosthesis using a high torque actuator (built-in 9:1 planetary gear) with a customized 4:1 low-inertia planetary gearbox. Benchtop experiments show that proposed the prosthesis can produce 200 Nm high peak torque, high compliance (2.6 Nm backdrive torque), and high control accuracy (2.7/8.1/1.7 Nm RMS tracking errors for 1.25 m/s walking, 2 m/s running, and 0.25 Hz squatting, that are 5.4%/4.1%/1.4% of desired peak torques).
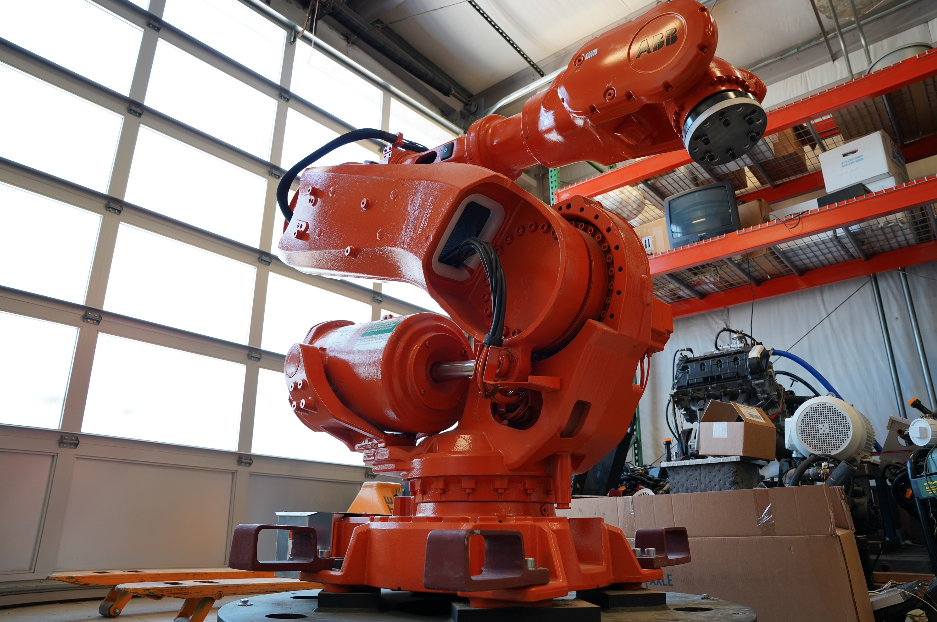
Industrial Robots
The two ABB industrial robot arms are flexible and agile robots with a large working envelope, and the robot controller is equipped with an advanced motion control feature, MultiMove, to enable multiple robots to work as a team and synchronously complete tasks. The ABB IRB 6620 has a handling capacity of 150 kg and a reach of 2.2 meters, and the ABB IRB 6640, has a slightly greater handling capacity at 185 kg and a greater reach at 2.8 meters.